
OpenCV清除小面积连通域的实现方法
本文主要介绍了OpenCV清除小面积连通域的实现方法,文中通过示例代码介绍的非常详细,具有一定的参考价值,感兴趣的小伙伴们可以参考一下
场景需求
使用OpenCV,往往遇到这类场景:需要清除目标图像中比较小的噪声区,保留主要区域信息。
特此分享自己写的一个简单的清除小面积连通域函数,逻辑比较简单,给大家留出了足够的发展空间,根据自身场景需求进行调整。
原理可以简单归结为:搜索图像的连通区轮廓->遍历各个连通区->基于阈值删除面积较小的连通区
运行速度方面,我没单独测试过这个单元,大家如果试过之后太慢可以评论告诉我哦~
反正平常我工作跑那种2000*2000的图像,这个函数的耗时几乎忽略不计。。。
C++实现代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 | /*** @brief Clear_MicroConnected_Areas 清除微小面积连通区函数* @param src 输入图像矩阵* @param dst 输出结果* @return min_area 设定的最小面积清除阈值*/void Clear_MicroConnected_Areas(cv::Mat src, cv::Mat &dst, double min_area){ // 备份复制 dst = src.clone(); std::vector<std::vector<cv::Point> > contours; // 创建轮廓容器 std::vector<cv::Vec4i> hierarchy; // 寻找轮廓的函数 // 第四个参数CV_RETR_EXTERNAL,表示寻找最外围轮廓 // 第五个参数CV_CHAIN_APPROX_NONE,表示保存物体边界上所有连续的轮廓点到contours向量内 cv::findContours(src, contours, hierarchy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE, cv::Point()); if (!contours.empty() && !hierarchy.empty()) { std::vector<std::vector<cv::Point> >::const_iterator itc = contours.begin(); // 遍历所有轮廓 while (itc != contours.end()) { // 定位当前轮廓所在位置 cv::Rect rect = cv::boundingRect(cv::Mat(*itc)); // contourArea函数计算连通区面积 double area = contourArea(*itc); // 若面积小于设置的阈值 if (area < min_area) { // 遍历轮廓所在位置所有像素点 for (int i = rect.y; i < rect.y + rect.height; i++) { uchar *output_data = dst.ptr<uchar>(i); for (int j = rect.x; j < rect.x + rect.width; j++) { // 将连通区的值置0 if (output_data[j] == 255) { output_data[j] = 0; } } } } itc++; } }} |
测试代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 | #include<iostream>#include<opencv2/opencv.hpp> using namespace std;using namespace cv; void Clear_MicroConnected_Areas(cv::Mat src, cv::Mat &dst, double min_area); int main(void){ Mat A = Mat::zeros(500, 500, CV_8UC1); circle(A, Point2i(100, 100), 50, 255, -1); circle(A, Point2i(300, 400), 15, 255, -1); Mat B; Clear_MicroConnected_Areas(A, B, 1000); imshow("before:A", A); imshow("after:B", B); waitKey(0); system("pause"); return 0;} void Clear_MicroConnected_Areas(cv::Mat src, cv::Mat &dst, double min_area){ // 备份复制 dst = src.clone(); std::vector<std::vector<cv::Point> > contours; // 创建轮廓容器 std::vector<cv::Vec4i> hierarchy; // 寻找轮廓的函数 // 第四个参数CV_RETR_EXTERNAL,表示寻找最外围轮廓 // 第五个参数CV_CHAIN_APPROX_NONE,表示保存物体边界上所有连续的轮廓点到contours向量内 cv::findContours(src, contours, hierarchy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE, cv::Point()); if (!contours.empty() && !hierarchy.empty()) { std::vector<std::vector<cv::Point> >::const_iterator itc = contours.begin(); // 遍历所有轮廓 while (itc != contours.end()) { // 定位当前轮廓所在位置 cv::Rect rect = cv::boundingRect(cv::Mat(*itc)); // contourArea函数计算连通区面积 double area = contourArea(*itc); // 若面积小于设置的阈值 if (area < min_area) { // 遍历轮廓所在位置所有像素点 for (int i = rect.y; i < rect.y + rect.height; i++) { uchar *output_data = dst.ptr<uchar>(i); for (int j = rect.x; j < rect.x + rect.width; j++) { // 将连通区的值置0 if (output_data[j] == 255) { output_data[j] = 0; } } } } itc++; } }} |
、
测试效果
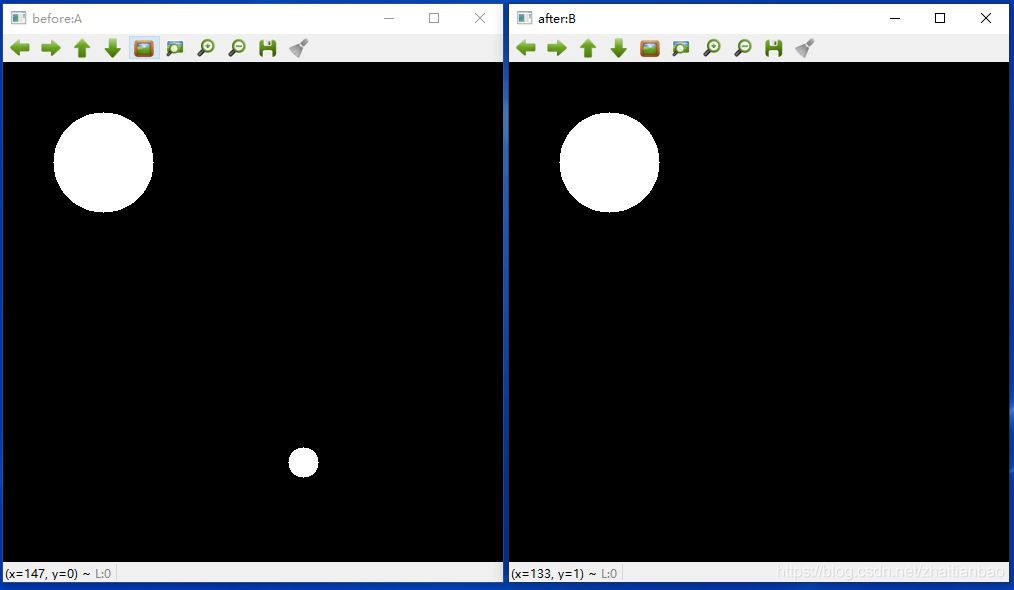
图1 处理前后图
到此这篇关于OpenCV-清除小面积连通域的文章就介绍到这了